The fundamental steps of the DDBD procedure has been eloquently presented in many prior publications (M. Priestley 2000; Priestley 2003; M. J. N. Priestley, Calvi, and Kowalsky 2007). This write up is my attempt to summarize this design philosophy in as little words as possible. It is convenient to illustrate the DDBD procedure using an SDOF structure. For MDOF structures, the usual practice is to represent them as equivalent SDOF structures using the substitute structure method proposed by Shibata and Sozen (1976). In Figure 1a, a regular frame building and its equivalent SDOF structure is conceptualized. It must be noted that this approach can be extended to any structural type. The bilinear envelope of the lateral force-displacement response of the equivalent SDOF representation is shown in Figure 1b.
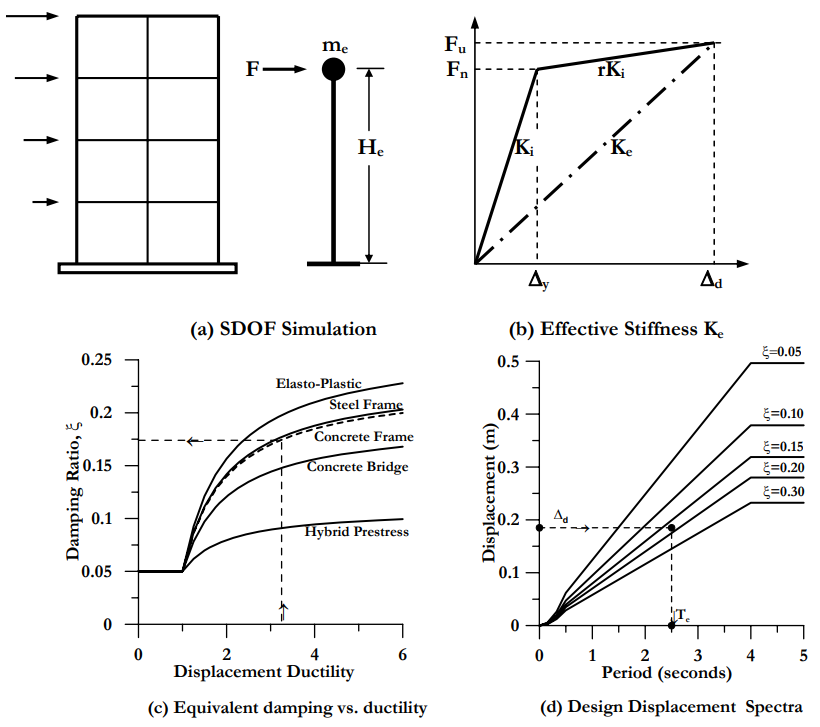
Figure 1: Fundamentals of DDBD
The first step in this procedure is to characterize the limit states of the structure. Generally, these limit states are based either on structural damage or on functional limitations of the structure. For example, in steel pile supported bridges, buckling of the pile cross-section is an important limit state because it precedes drastic reduction in the strength of the system. Alternatively, if these bridges are simply supported at the abutments, the seat width of girders at the abutments may determine a functional limit state, i.e., the girders must not slide off their support. In either case, these limiting events can be translated into a level of structural displacement of these bridges. In DDBD, these displacements that correspond to a given limit state is called the Target Displacement for design. The goal of DDBD procedure is to force the structure to respond in a desirable way, in the sense that the structure undergoes a peak displacement (Δd) equal to the target displacement (Δt) under the design level seismic event.
Once the target displacement is determined, the next step is to use the design displacement response spectra to determine the effective period of the structure. The effective period (Te) of a structure is the period of its most significant mode shape at peak response. Te can be calculated using the secant stiffness (Ke) of the structure at any given limit state, as shown in Figure 1b. Naturally, Te depends on the corresponding limit state under consideration and must be differentiated from the initial elastic period Ti, which is a parameter commonly used in force-based design. Te can be determined for a given hazard by entering the design displacement spectrum on its y-axis at the value given by Δd, as shown in Figure 1d. Te can be read from the x-axis of the response spectrum curve corresponding to the appropriate level of damping in the system.
The damping in a structure is characterized by what is known as the equivalent viscous damping ratio (ξeq) M. J. N. Priestley, Calvi, and Kowalsky (2007). ξeq of a structure is evaluated as a linear combination of its inherent viscous component and the hysteretic component. Viscous damping is a catch-all quantity to represent contributions from many different mechanisms that contribute to structural damping. On the other hand, hysteretic damping is exhibited by the structure under an earthquake because of its non-linear excursions that dissipate strain energy. ξeq can also be understood as the damping ratio of the equivalent elastic SDOF structure, that upon excitation by the same ground motion, results in the same peak response as the inelastic MDOF structure. There exist relationships M. J. N. Priestley, Calvi, and Kowalsky (2007) between equivalent viscous damping and system ductility for various classes of structures, represented graphically in Figure 1c. For any given level of displacement ductility, which can be evaluated using the target and yield displacement limits, ξeq can be read from Figure 1c. Recollect that this information is then used to determine the response spectrum curve that must be used to obtain the effective period.
The next step is to calculate the total base shear of the structure which can then be used to obtain design forces for structural members. After evaluating Te, Equation (1) can be used to obtain the effective or secant stiffness (Ke) of the equivalent SDOF structure, where M is the total participating mass of the structure. Subsequently, Equation (2) can be used to determine the base shear (VB).
Ke=4π2MT2e VB=KeΔtUnder a few minimal assumptions, the base shear (VB) can also be evaluated directly using a single equation (M. J. N. Priestley, Calvi, and Kowalsky 2007), as shown in Equation (3). In this equation, Δc and Tc are corner point displacement and period as given by the design response spectrum.
VB=4π2MΔt(ΔcTc)272+ξeqReferences
Priestley. 2003. “Myths and Fallacies in Earthquake Engineering, Revisited: The Ninth Mallet Milne Lecture.” Istituto Universitario di Studi Superiori di Pavia.
Priestley, M J N, G M Calvi, and M J Kowalsky. 2007. Displacement-Based Seismic Design of Structures. First Edition. Pavia, ITALY: IUSS Press.
Priestley, MJN. 2000. “Performance Based Seismic Design.” Bulletin of the New Zealand Society for Earthquake Engineering 33 (3). Citeseer: 325–46.
Shibata, Akenori, and Meta A Sozen. 1976. “Substitute-Structure Method for Seismic Design in R/c.” Journal of the Structural Division 102 (ASCE# 11824).